DCAM550
深度相机¥2799~¥3599, 高帧率高性价比
特点
 视场角可定制,max.105°(H)*90°(V)高分辨率,640x480 VGA深度图像高帧率,最高达30fpsPoE+供电模式与IP67等级供选择可在强光和黑暗中无障碍识别
视场角可定制,max.105°(H)*90°(V)高分辨率,640x480 VGA深度图像高帧率,最高达30fpsPoE+供电模式与IP67等级供选择可在强光和黑暗中无障碍识别 人眼安全FDA Class I认证
人眼安全FDA Class I认证
DCAM550下载产品规格书 |
 |
 |
 |
|---|---|---|---|
| 产品名称 | DCAM550-P | DCAM550-E | DCAM550-U |
| ToF传感器规格 | Pulse iToF , 640*480dpi | Pulse iToF , 640*480dpi | Pulse iToF , 640*480dpi |
| ToF帧率 | Max. 30fps | Max. 30fps | Max. 30fps |
| 激光发射器 | 940nm VCSEL*2 | 940nm VCSEL*2 | 940nm VCSEL*2 |
| ToF视场角 (FOV) | 69°(H)* 51°(V) | 69°(H)* 51°(V) | 69°(H)* 51°(V) |
| RGB传感器规格 | 无RGB模组 | 无RGB模组 | 无RGB模组 |
| RGB视场角 (FOV) | 无RGB模组 | 无RGB模组 | 无RGB模组 |
| 供电方式 | PoE+/12V~24V DC | PoE+/12V~24V DC | 12V~24V DC |
| 物理接口 | RJ45+DC插座+6pin连接器 | M12航空插头×2 | USB+DC插座+6pin连接器 |
| 通信协议 | 以太网(100M)&RS485 | 以太网(100M)&RS485 | USB 2.0&RS485 |
| 数据输出格式 | 16bit(深度, IR) | 16bit(深度, IR) | 16bit(深度, IR) |
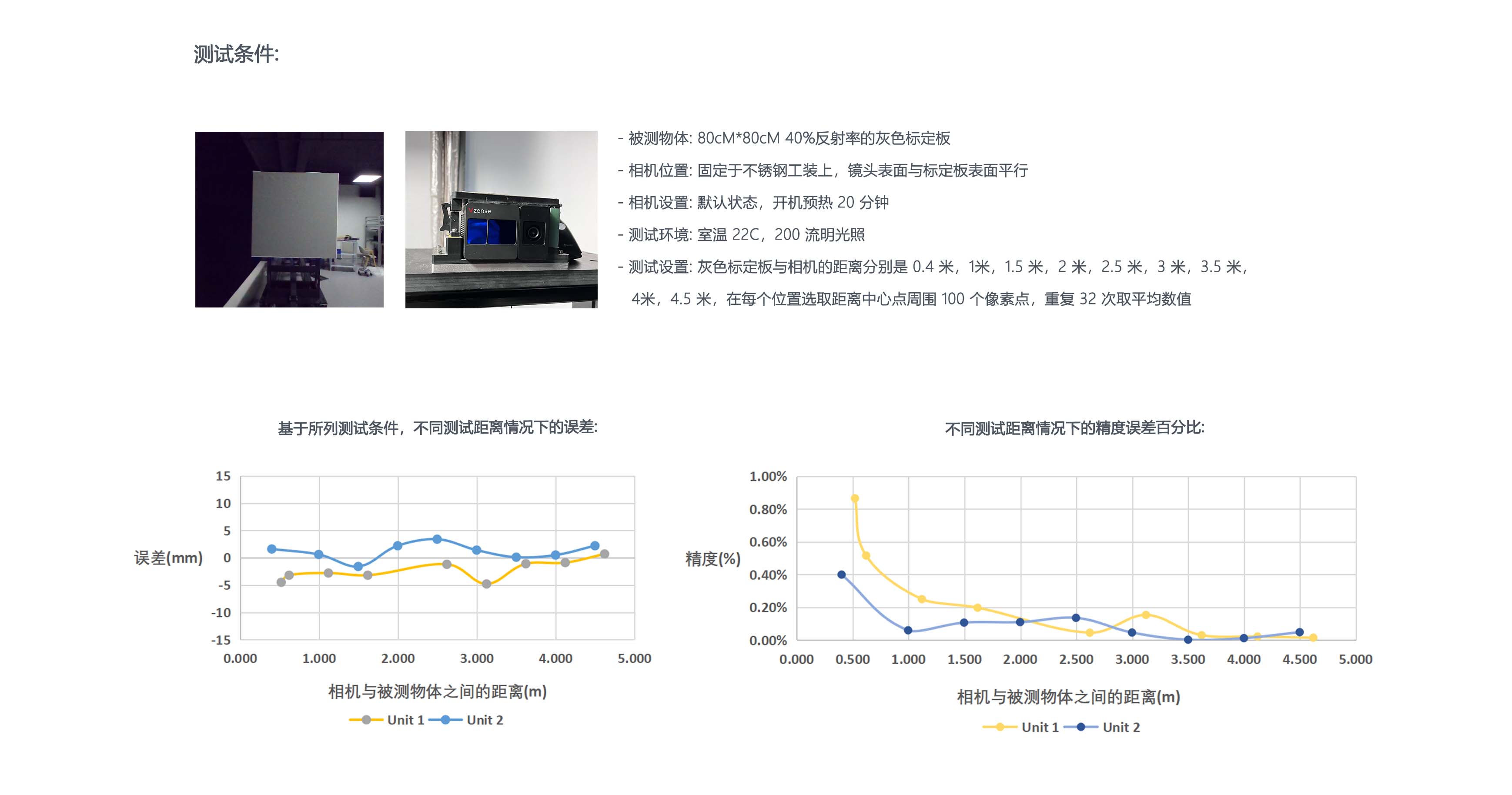
| 精度误差 | 1%~2% | 1%~2% | 1%~2% |
| 检测距离 | 0.35~6m | 0.35~6m | 0.35~6m |
| 工作温度 | -20°C ~ 50°C | -20°C ~ 50°C | -20°C ~ 50°C |
| 操作系统与平台 | Windows/Linux/Arm Linux/ROS1 | Windows/Linux/Arm Linux/ROS1 | Windows/Linux/Arm Linux/ROS1 |
| 开发语言与Wrapper支持 | C/C++/Python | C/C++/Python | C/C++/Python |
| IP防护等级 | IP42 | IP67 | IP42 |


想获取更多?点击前往 下载中心
想获取更多?点击前往 下载中心

【操作】 为什么可以搜索到网口类设备但却打不开相机?

1.确认相机的连接和供电没有问题,相机的蓝色指示灯闪烁 2.查看相机IP(默认192.168.1.101)是否能ping通 ①若无法ping通,查看主机端的IP是否和相机默认IP处于同一网段 ②若可以ping通,查看防火墙是否关闭,或允许工具使用公用网络和专用网络 如以上措施均不能解决问题,请用ipconfig指令查看PC端网络状态,将除与相机同一网段之外的网络禁用再次搜索设备。仍不能解决问题,请联系我们的工程师获取支持。 关于网口类产品的连接方式及常见问题也可参考视频:https://www.bilibili.com/video/BV1EG4y1h7E2
【操作】 通过GUI保存的IR图和深度图为什么打不开?点云图如何查看?
不论对于DCAM系列所使用的UTool,还是对于DS系列所使用的NebulaGUI,两者所保存的IR和Depth图像是16bit图片数据,使用系统自带的图片浏览器无法打开,可以使用ImageJ等软件打开查看;GUI保存的点云图是.txt 格式,从上到下行依次为pixel 0至最后一个 pixel的坐标点信息,每一行的数值依次为该pixel的X,Y, Z坐标,保存的点云图可使用CloudCompare软件进行查看,相关说明请参考链接:https://cdn.yun.sooce.cn/4/62267/pdf/16339227552770a0bd9e3dcaf8a6b.pdf
【操作】 【DCAM系列】每次初始化设备都要重新配置相机相关参数,如range,mode,pulsecount,是否可以永久写入?
可以,相机启动的常用参数,都可以通过VzenseConfigTool进行配置永久写入,再次启动无需通过API进行设置。
【操作】 【DCAM系列】如何对Vzense DCAM系列ToF相机的固件进行升级?
参考下载和使用说明链接: https://gitee.com/Vzense/VzenseUpgradeTool(升级工具,内有文档) https://gitee.com/Vzense/DeviceFirmware-List(固件列表)
【操作】 【DCAM系列】如何操作更改产品默认参数(如输出模式,IP设置等)?
通过Windows环境下的配置工具来配置,请查看链接: https://gitee.com/Vzense/VzenseConfigTool
【操作】 【DCAM系列】Windows系统使用升级工具升级后,操作平台出现闪退如何解决?
升级工具里有升级驱动,如果未安装驱动,会导致该问题出现,驱动安装成功后闪退问题得到解决。
【SDK】 Vzense ToF相机支持的开发语言及操作系统平台?
开发语言:C/C++, ROS, Python, C# 操作系统:Windows/Linux/Arm Linux
【SDK】 如何使用Vzense的产品进行二次开发?
Vzense软件开发工具包 (SDK) 支持不同软件平台和编程语言的SDK,助用户快速构建和扩展自定义解决方案。 SDK下载链接:https://gitee.com/Vzense
【SDK】 相机每个点的深度值是指这个点到相机点距离还是点到相机平面的距离?
默认是点到相机平面距离。DCAM系列产品可以通过调用接口Ps2_SetComputeRealDepthCorrectionEnabled来设置:true(默认值)代表点到相机平面距离;false代表点到相机点距离。
【SDK】 如何在SDK中获取带RGB映射的彩色点云?
DS系列在SDK中有直接提供带RGB映射的彩色点云的sample。相对路径为NebulaSDK/XXX/Samples/Base/DS77C/PointCloudCaptureAndSaveDepthImgToColorSensor DCAM系列在SDK中没有直接提供带RGB映射的彩色点云的sample。可按照以下流程完成调用: 1.设置Ps2_SetMapperEnabledRGBToDepth为Enable; 2.获取PsMappedRGBFrame图像,获取depth生成的点云; 3.保存2获取的PsMappedRGBFrame和点云为xyzrgb点云文件即可。
【SDK】 运行linux Base SDK的Tools下程序时提示“error while loading shared libraries xxx.so file too short”,原因是什么?
出现以上错误,一般是由于用户下载SDK时,是在Windows电脑上下载并解压的,然后把解压后的文件复制到了Linux系统下运行导致的。请把下载的SDK压缩包直接复制到Linux系统,并在Linux系统上解压,然后运行即可。
【SDK】 在SDK的使用过程中,Ps2_ReadNextFrame超时时间是否可以更改?
可以,通过接口Ps2_SetWaitTimeOfReadNextFrame进行设置,具体步骤请参考SDK文档说明。
【SDK】 在SDK的使用过程中,Ps2_ReadNextFrame会发生超时的原因是什么?
Ps2_ReadNextFrame的作用是查询等待SDK图像ready,如果没有ready会休眠等待,如果在默认的等待时间依然无法获取图像,则会超时退出。默认的超时时间为350ms,但如果用户使用slave触发模式时,因为触发频率不确定,在频率超过默认超时的情况下,也会收到读取超时,但不影响使用。
【SDK】 Vzense SDK log存放位置在哪?
Windows: C:\Users\xxxx\AppData\Local\Vzense\Log Linux: /home/.config/Vzense/Log
【SDK】 使用Vzense图形化软件工具显示出来的图像是做过后处理的吗?如何去查看各种后处理算法的效果?
是的。用户可使用GUI工具按照使用说明对各种处理效果的开关进行调整设置,根据自身项目需求确定所需处理效果或者参数,通过SDK中的各接口对模组默认值进行调整。
【产品】 ToF相机在室外强光环境下的表现如何?
在环境光变化的情况下,ToF相机捕捉的图像可以保持较高的稳定性,这也是很多用户选择ToF相机的理由之一。了解Vzense ToF相机在室外强光环境下的表现,可以查看此视频:https://www.bilibili.com/video/BV1wD4y1b77D
【产品】 如何定制Vzense 3D ToF模组?
针对批量需求,维感科技可在外观设计、尺寸结构、使用距离、视场角度、接口协议和操作系统SDK对3D ToF模组进行深度定制。根据不同的定制化需求,开发周期长短不一,通常情况下,手板样品需要2~3个月时间,产品达到量产阶段总共需要5~6个月左右。
【产品】 环境温度过高是否会影响设备的稳定性?
在使用环境温度不超过每款产品标注的温度时,模组的稳定性不会收到影响。极限使用温度建议不超过-20℃~60℃。所有型号的相机产品都已经做过高低温可靠性试验。如需在极限高温环境下使用,建议增加外部散热设计,例如散热片或者风扇,会对模组长时间运行有一定的保护作用。
【产品】 为什么用ToF相机拍摄直角墙时,深度图会产生弯曲?
因为在直角的角落会产生多径干扰,相机打出去的光在角落里会发生来回反射,所以看上去会有弧度。
【产品】 ToF相机能否在雨天使用,雨水打湿镜头会对相机性能产生影响吗?
下雨的环境对相机测量精度会有影响,不建议雨中使用。对于满足IP67标准的几款相机,下雨的环境不会造成相机损坏。
【产品】 Vzense ToF相机的图像从产生到通过SDK获取,有多久的延时?
不同型号的Vzense ToF相机,因不同的传输接口和主机性能,延时会有差异,范围约为50~100ms。用户可通过软触发模式,针对所使用的平台进行测试。
【产品】 Vzense ToF相机使用的光源是否对人体有害?
Vzense ToF相机所使用的VCSEL器件总功率不超过2W,产品通过了美国FDA Class 1人眼安全等级认证,不会对人体产生伤害。
【产品】 在使用Vzense ToF深度相机测量黑色、高光、透明物体时,测量精度会有影响吗?
DCAM系列在测量黑色、高光、透明物体时,由于物体表面的反射率过高/低,会对反射光路产生一定的干扰,导致精度降低甚至无法成像;DS系列产品具备HDR功能,已经很好的解决这些问题。另外,当ToF深度相机在测量物体时,镜头前方的光路如被遮挡,测量精度也会降低。
【产品】 Vzense RGB-D相机(如DCAM560C和DS77C),RGB图像与深度图像是对齐的吗?
是的。Vzense RGB-D相机标品在出厂前,内外参均已进行过标定,输出的RGB图像与深度图像已在相机内部处理器上面完成了对齐,同时也开放了供用户自行进行对齐的接口。 用户拿到相机后,通过GUI即可以查看RGB与深度图的对齐效果,有两个对齐效果可供查看:RGB像素点对应到深度图像素点,深度图像素点对应到RGB像素点。
【产品】 Vzense的ToF相机镜头表面可以增加透明盖板进行保护吗?
不可以。产品本体已经带有保护盖板,如果对于盖板硬度有额外的需求,可以联系我们进行定制,最高硬度可达9H。如用户自行增加盖板,会对ToF模组的光路产生干扰,对于模组的成像质量和精度都会有很大的影响。
【产品】 【DCAM系列】多台相机同时使用时,是否会有相互干扰的问题?
Vzense的DCAM系列产品针对不同的使用场景提供有效消除或降低多机干扰影响的方法,详情请参考我们的应用笔记。 笔记链接:https://cdn.yun.sooce.cn/4/62267/pdf/16355628650517a063f3d88ea3c3d.pdf

扫码关注
 中文
中文