中文
中文










让机器拥有“非凡”的视觉
我们生活的世界是一个三维立体的空间,人类最重要的感知器官——眼睛,既可以为人类提供五颜六色的色彩信息,也可以在大脑中形成距离感,让我们可以感知到一个立体的世界。 自第一片CCD图像传感器在贝尔实验室诞生,在过去的几十年里,机器视觉和数码成像技术有了长足的进展,为社会各行各业赋予巨大的能量,人们的生活、工业自动化、航空航天等领域都开始与图像和视觉技术进行了广泛的链接。
机器视觉领域从萌芽到成长,以彩色视觉留存为切入点的二维图像技术经历了从模拟到数字,从静态到动态,从单色到彩色的演进过程。当前的三维视觉技术是人类为了提升机器视觉的维度,将立体图像呈现在眼前,可以满足以往2D视觉难以实现的应用场景,如Face ID,手机,VR/AR,工业视觉等方向,在各行各业开始新一次的视觉革命!

如上图所示,不同于左侧传统彩色相机所拍摄出的图像,右侧立体视觉技术所展示出来的图像是一个由每个像素点到相机的距离值组成的。为了更好的呈现距离的差异,通常会将不同的距离值映射到色域空间,这样用户更容易理解深度图像的含义,如下图所示:

三维视觉技术的目的和发展方向就是通过各种方法来获取到更精准,更细腻,更快速的深度图像。
3D视觉技术的分类
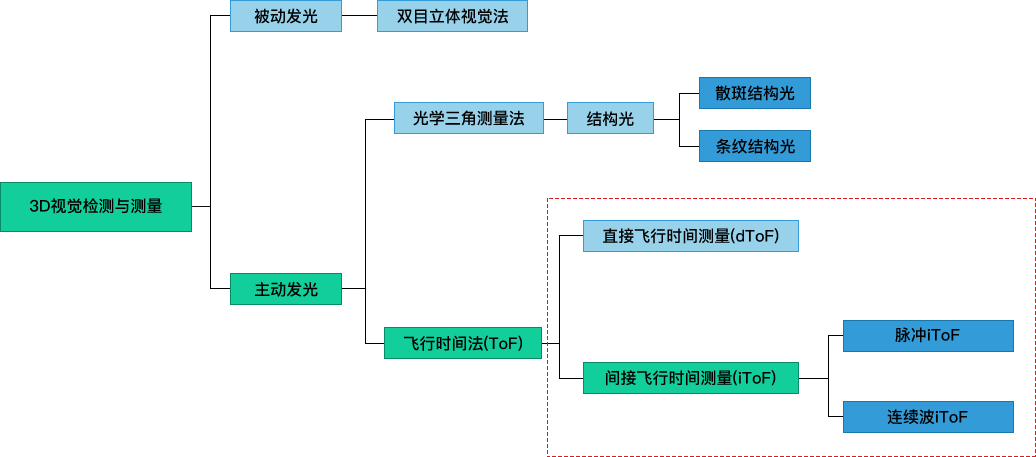
双目视觉技术是通过三角测距法计算物体到相机的距离。同一物体在左右两个相机的成像位置是位置差的,不同的位置差可被反映到像素差,从而推算出距离;结构光技术是属于主动立体视觉技术,通过激光投射器投射出带有形状的光,这个形状照在物体上发生形变,然后推算出距离;我们重点介绍ToF(Time-of-Flight)技术,直译为飞行时间技术,广义上讲,所有测量介质飞行时间方式都属于ToF技术范畴。在以光为介质进行ToF测量时,其原理是,由ToF模组的光源向被测对象发出光子,在抵达被测对象并通过图像传感器接收反射回到ToF模组的光子,计量此段“光的飞行时间”,在光速已知的前提下,即可得到距离数据。
最简单的单像素ToF技术采用调制准直激光器作为发射器,单光电二极管作为接收器,可以用来提供单点的距离信息,若期望使用单像素距离传感器来提供整个场景的深度图,一般会采用某种扫描的形式,下图示是单像素ToF测距技术的原理。
3D ToF技术是通过一次性成像来提供完整场景深度图,无扫描器件,随着半导体元器件尺寸的不断缩小,结构紧凑、高性价比的ToF深度相机在工业和消费电子领域得到了快速应用和发展。
ToF相机的组成
ToF相机是指以光学系统为接受路径的面阵非扫描式3D成像深度信息捕捉技术,主要由照射单元,光学透镜,成像传感器,控制单元,计算单元等器件组成。
- 照射单元
照射单元需要对光源进行脉冲调制之后再进行发射,调制的光脉冲频率可以高达100MHz。因此,在图像拍摄过程中,光源会打开和关闭几千次,各个光脉冲只有几纳秒的时长。相机的曝光时间参数决定了每次成像的脉冲数。要实现精确测量,必须精确地控制光脉冲,使其具有完全相同的持续时间、上升时间和下降时间。因为即使很小的只是1ns的偏差即可产生高达15cm的距离测量误差。如此高的调制频率和精度只有采用精良的LED或激光二极管才能实现。一般照射光源都是采用人眼不可见的红外光源。
- 光学透镜
用于汇聚反射光线,在光学传感器上成像,与普通光学镜头不同的是这里需要加一个带通滤光片来保证只有与照明光源波长相同的光才能进入,这样做的目的是抑制非相干光源减少噪声,同时防止感光传感器因外部光线干扰而过度曝光。
- 成像传感器
成像传感器是TOF相机的核心。该传感器结构与普通图像传感器类似,但比图像传感器更复杂,它包含2个或者更多快门,用来在不同时间采样反射光线。
- 控制单元
相机的电子控制单元触发的光脉冲序列与芯片电子快门的开/闭精确同步。它对传感器电荷执行读出和转换,并将它们引导至分析单元和数据接口。
- 计算单元
计算单元可以记录精确的深度图。深度图通常是灰度图,其中的每个值代表光反射表面和相机之间的距离。为了得到更好的效果,通常会进行数据校准。

3D ToF相机的实现原理
ToF 3D相机技术按照具体的实现方式,又可以分为iToF(indirect ToF)和dToF(direct ToF)。iToF又分为连续波(Continuous Waveform)ToF和脉冲式(Pulse Based)ToF,如下图所示:


dToF技术实现方式
dToF (direct time-of-flight) ,即直接飞行时间测距法,通过内部定时器计时的方式直接测量由发射端发出激光脉冲的时间tstart与经物体反射后回到接收端tstop的时间差,结合光速c,获取距离深度数据d,与下文提到得通过信号相位差来间接测量发射信号和接收信号的时间差的方式相比,这种测量时间差的方式更为直接,因此称为直接飞行时间测距法。
直接飞行时间测距原理直接且简单,但技术层面对发射端的光源、接收端的图像传感器,以及实现同步、时间检测相关电路都有着很高的要求。比如对发射端来说要产生这种短脉冲就有一定要求,而接收端的图像传感器也需要使用灵敏度极高的光探测技术来检测微弱的光信号,如单光子雪崩二极管(SPAD)技术。

CW ToF技术实现方式
连续波CW iToF的基本原理是通过把光调制成固定频率f的正弦波,发射端按照频率f发射正弦波,在采集返回的光能量时,CW iToF会开通多个窗口,对多个窗口收集的数据做采样,解析出一个周期内发射和接受之间的相位差信息,然后通过以下公式获得距离信息。

绝大多数连续波ToF系统都使用CMOS传感器,特别是背照式CMOS工艺技术大幅度提高了感光面积,提升了光子收集率和测距的速度,响应时间能够达到ns级;为实现相位解缠,CW ToF会应用多调制频率——这种方法对于减少多径错误会很有帮助;CW iToF是全CMOS成像系统,具备更好的弹性、更快的读出速度,但CW iToF方法也有一些缺点,它的图像传感器要求多调制频率下相关函数的四次采样,加上多帧处理,这样一来信号处理的复杂度会变高,可能会要求额外的应用处理器;对于更远的距离测量,或者场景内的环境光比较强,那么连续输出功率要求比较高,这对发热和稳定性会有影响。
Pulse ToF技术实现方式
下图是Pulse iTOF的原理示意,通过把光调制成固定频率f的方波,发射端按照频率f发射脉冲信号,接收端的传感器由两个电子快门(s1, s2)组成,S1窗口的频率和相位与发射脉冲是一致的,S1和S2窗口在打开(高电平)时,在各自的时间内积累由物体反射回来的光子,通过计算s1和s2不同的能量值比例,解析出信号相位,从而推算出发射信号和接收信号的时间差,进而获得距离数据。
相比CW-iToF连续波调试方式,Pulse iToF 解算深度更简单、计算量更低,对于平台后端处理能力要求也相应更低。从Pulse iTOF的原理看,Pulse iTOF是在短时间窗内发射高强度光脉冲,从而可以减少背景光信号的影响,使其对环境光变化的适应性更强,对场景运动模糊等问题的抵御也更好。(引自黄烨峰的文章)

ToF相机的技术特点
| 双目 | 散斑结构光 | 条纹结构光 | iTOF | dTOF | LiDar | |
|---|---|---|---|---|---|---|
| 精度 | 近距离高 | 近距离高 | 高 | 和距离呈线性关系 | 固定误差 | 毫米级 |
| 探测距离 | 近 | 近 | 近 | 中近 | 近中远 | 近中远 |
| 角度 | 中 | 中 | 中 | 大 | 大 | 极小 |
| 帧率 | 30fps | 30fps | 低2~3fps | 30fps | 中 | 中,15fps |
| 分辨率 | 中 | 中 | 高 | 中VGA~1M | 低HQVGA | 很低 |
| 售价 | 千元级 | 万元级 | 千元级 | 千元级 | 大几千 | |
| 抗光性 | 强 | 弱 | 弱 | 强 | 强 | 强 |
ToF技术的优势表现在多个维度,包括探测距离,角度,帧率,抗光性,性价比等;在对精度要求在mm级别以上的场景中,ToF技术具有比较大的优势。
ToF相机的应用领域
视觉定位与引导
 AGV避障
AGV避障
 传送带分拣与抓取
传送带分拣与抓取
 智慧农业视觉引导
智慧农业视觉引导
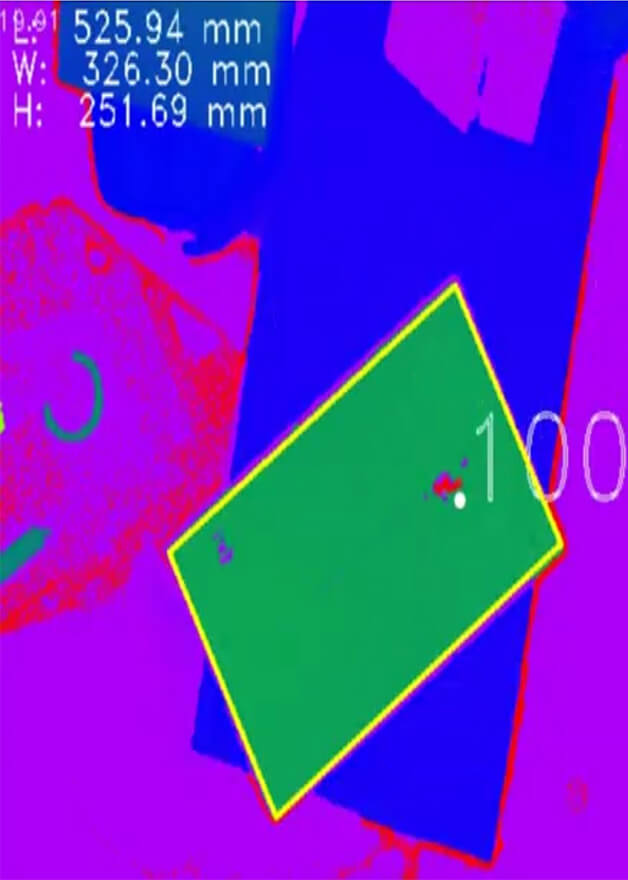 体积测量DWS
体积测量DWS
 视觉引导拆/码垛
视觉引导拆/码垛
人体姿态捕捉
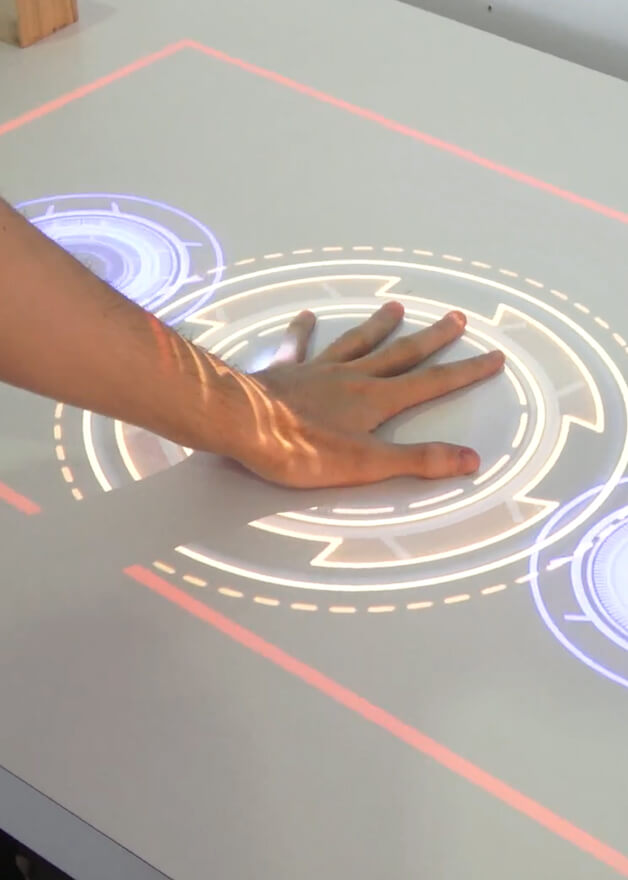 人机互动
人机互动
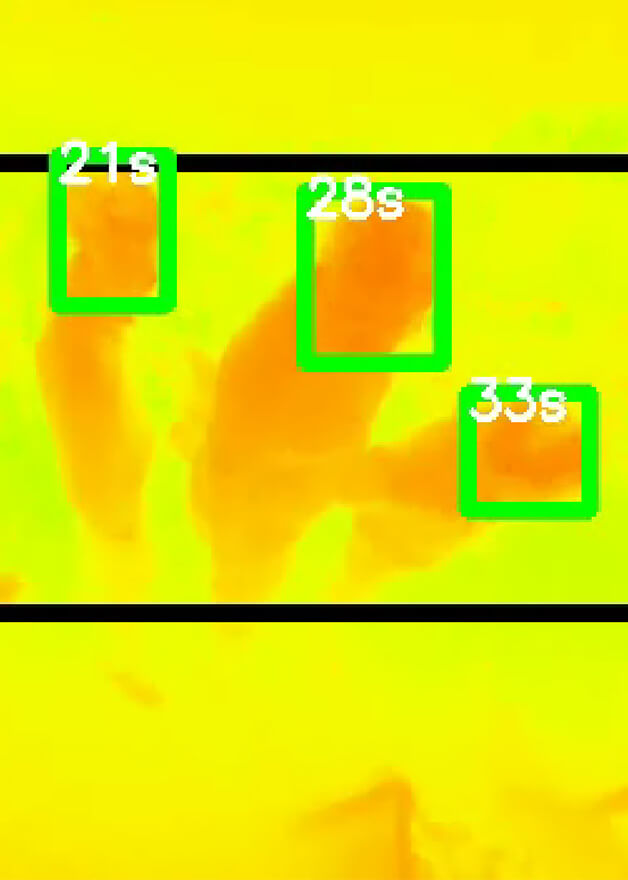
 非接触式跌倒检测
非接触式跌倒检测
 自动感应系统
自动感应系统
 客流统计与分析
客流统计与分析
视频介绍
操作说明
性能展示

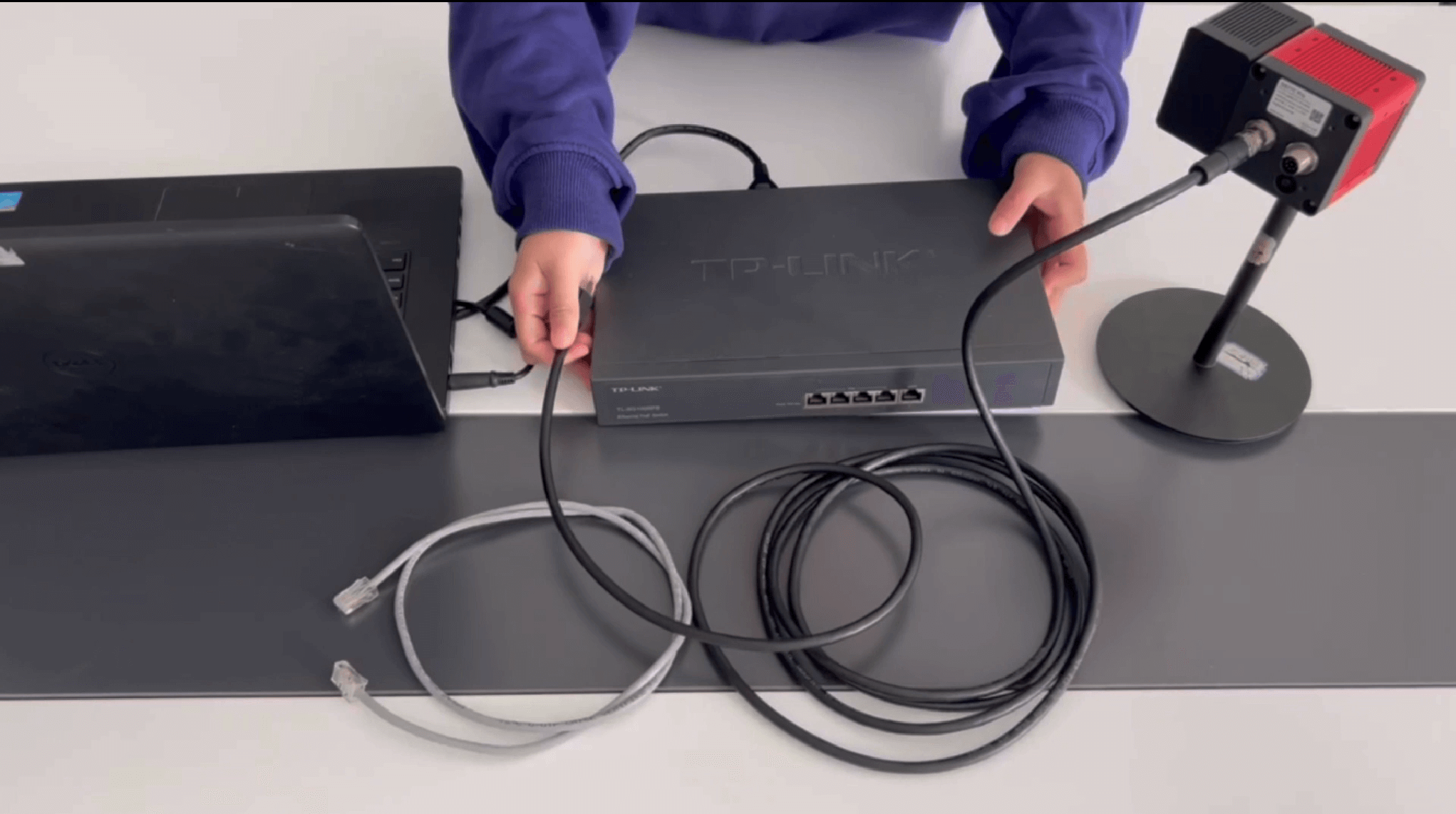
Vzense产品连接方式演示—以太网接口为例
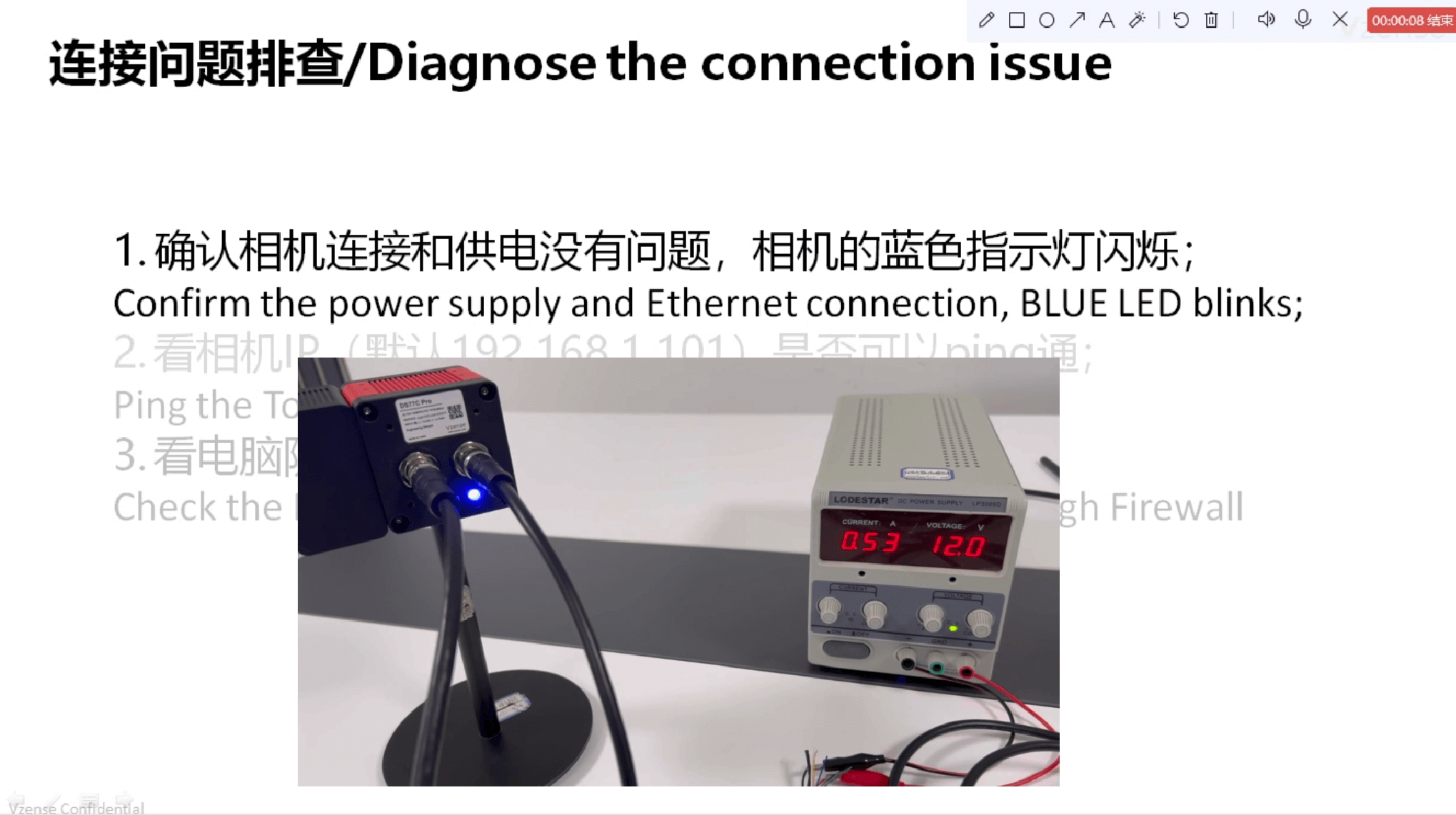
ToF相机连接问题排查
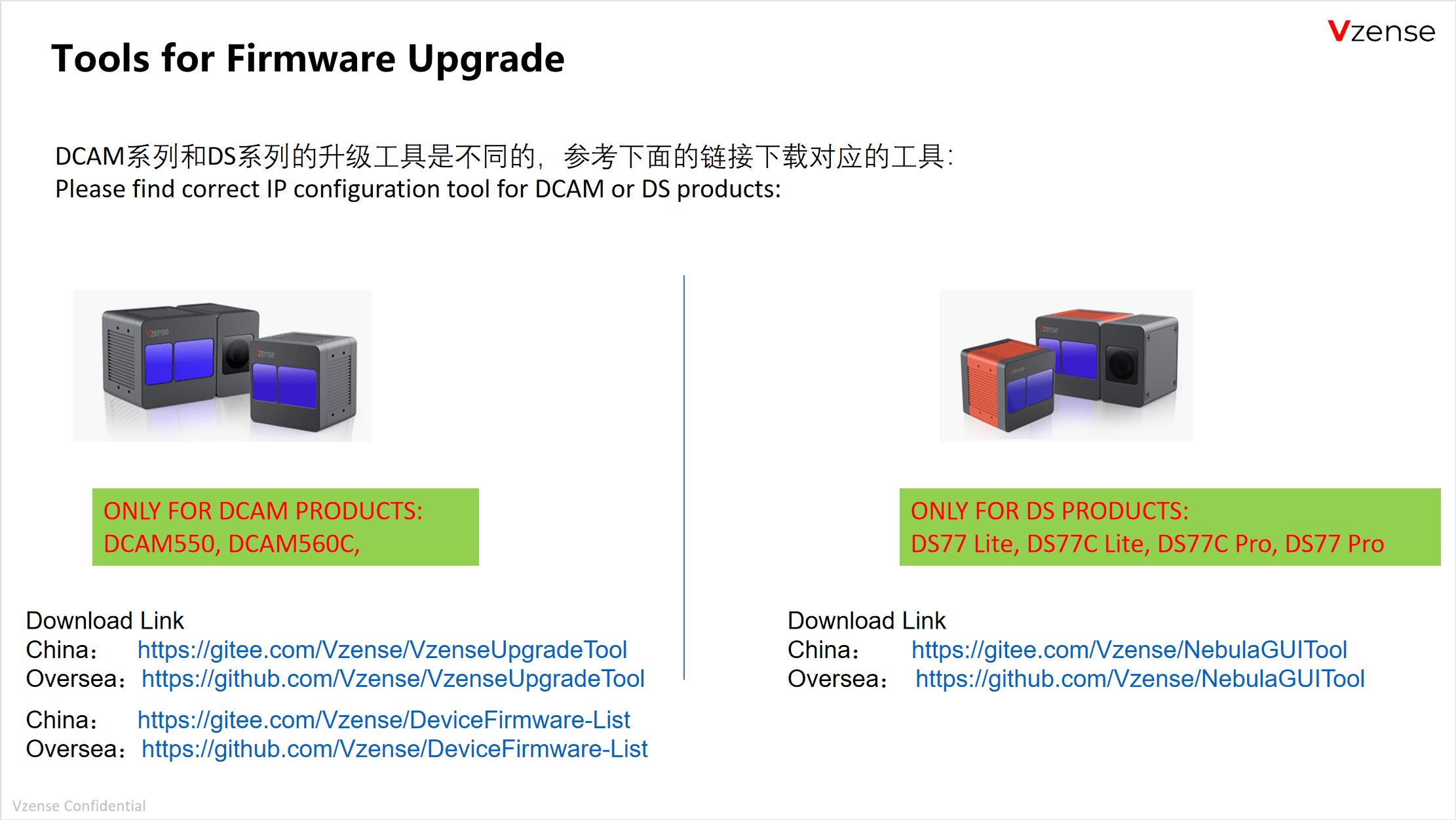
Vzense ToF相机固件升级的方法与演示

2022-12-08 POE供电介绍及演示
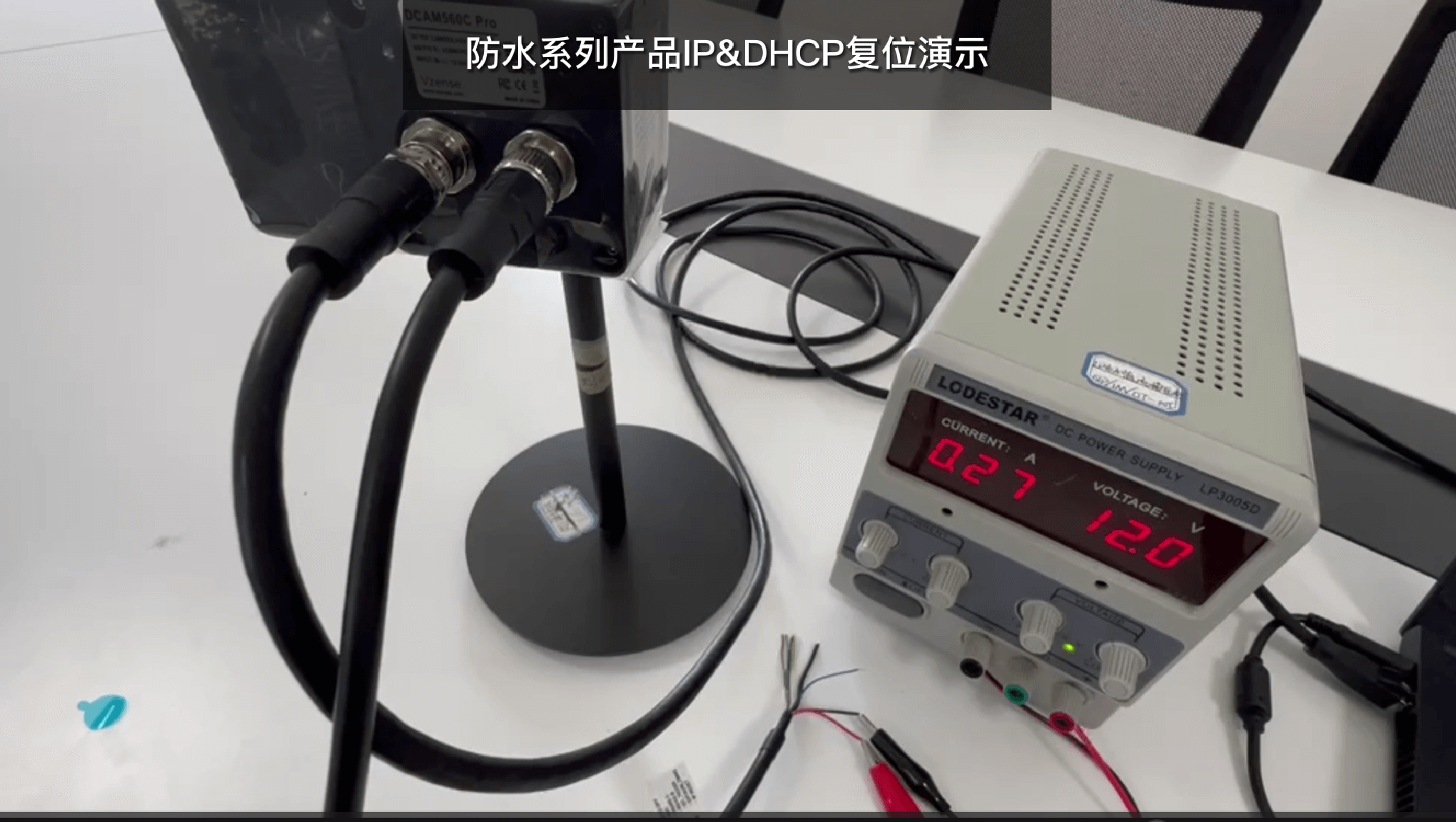
2022-12-22 Vzense ToF相机设置/复位固定IP和DHCP模式
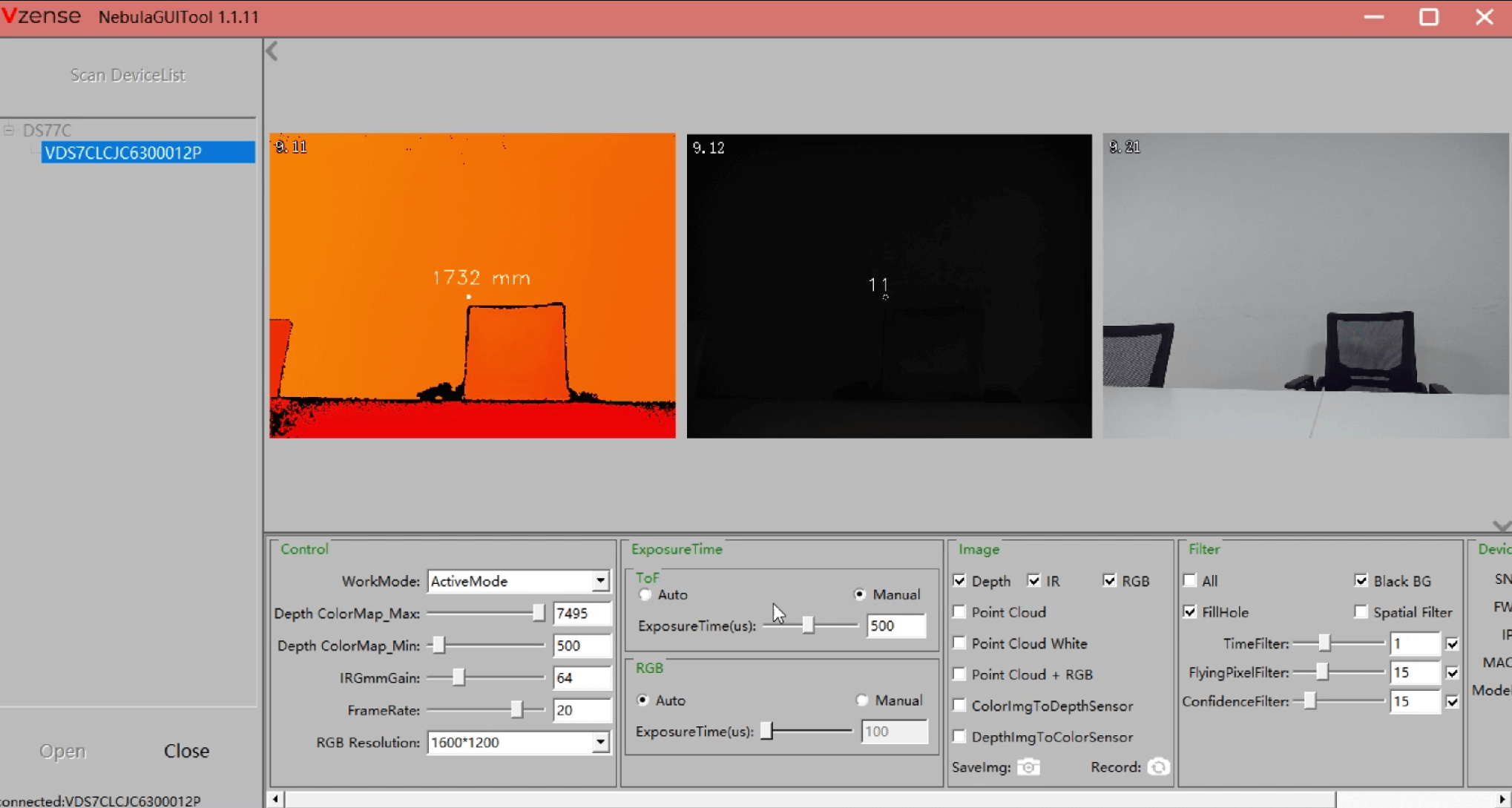
2022-12-23 DS77调节曝光时间和帧率介绍
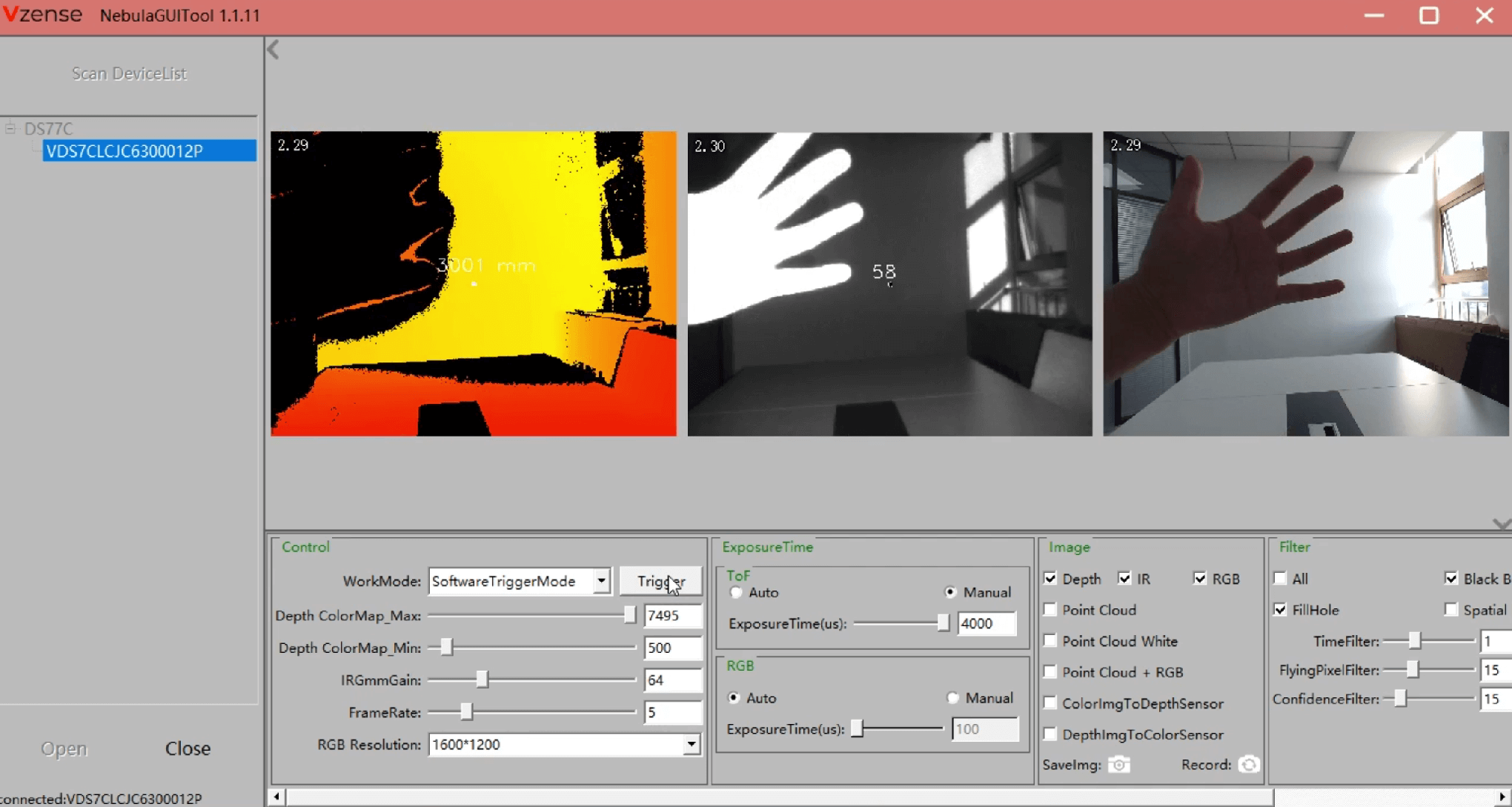
2022-12-23 软触发功能介绍
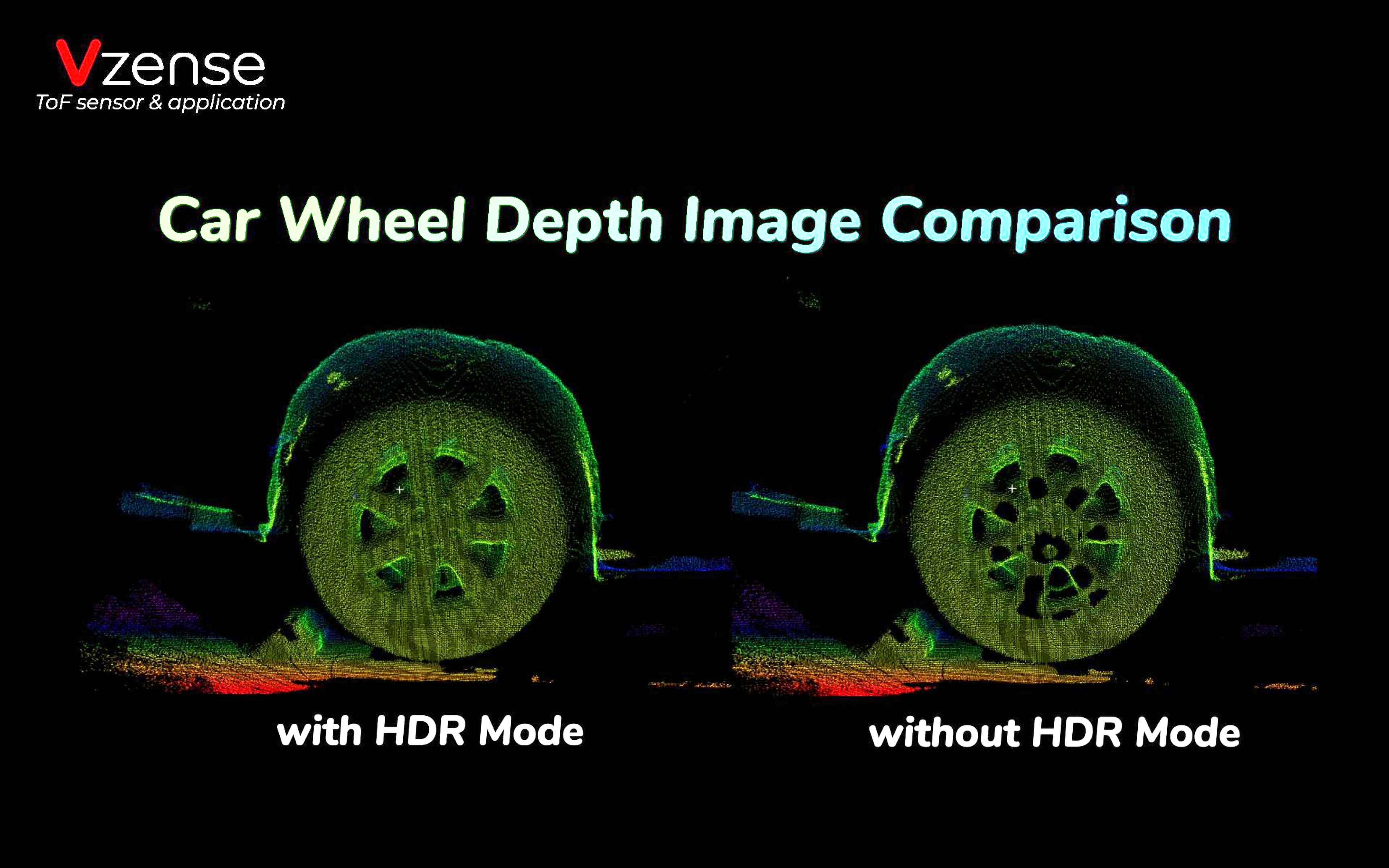
DS77系列新增HDR功能,解决高低反射率物体成像困难的问题
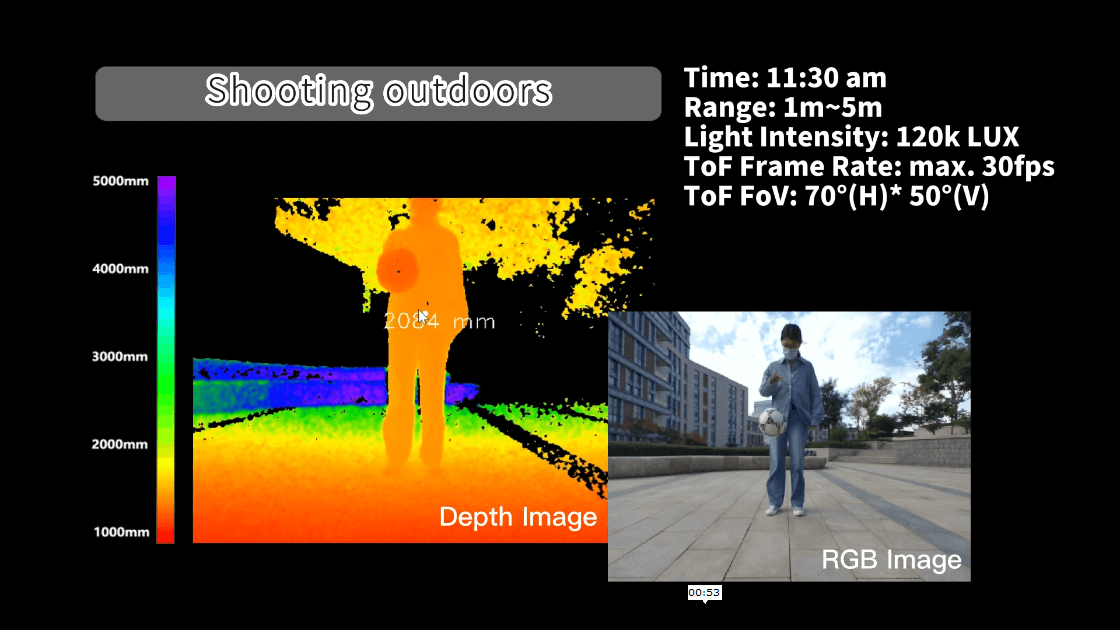
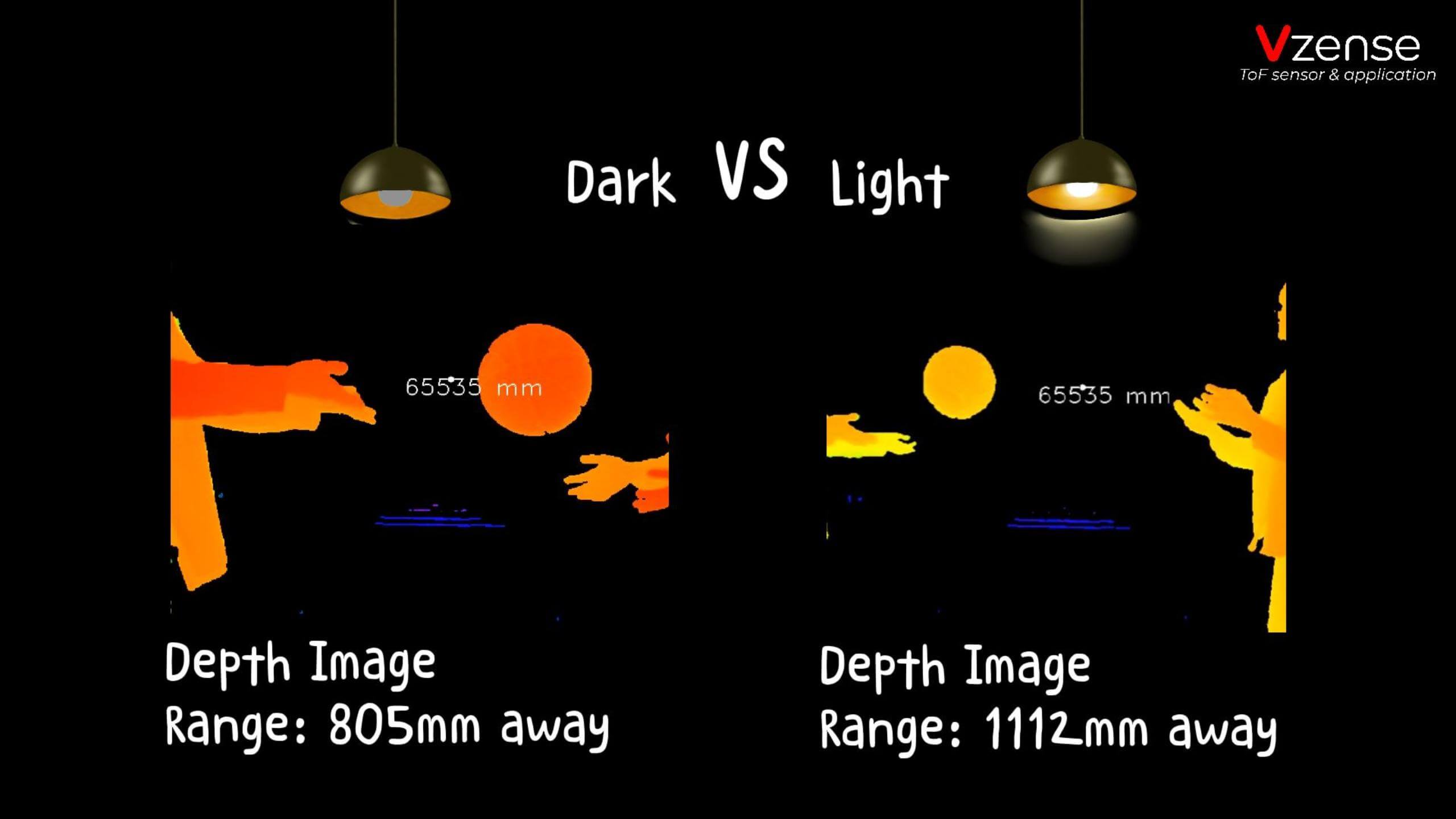
Vzense ToF 相机抗光性展示
Vzense ToF 相机抗光性展示
2022-12-23 Vzense ToF 相机动态识别效果展示
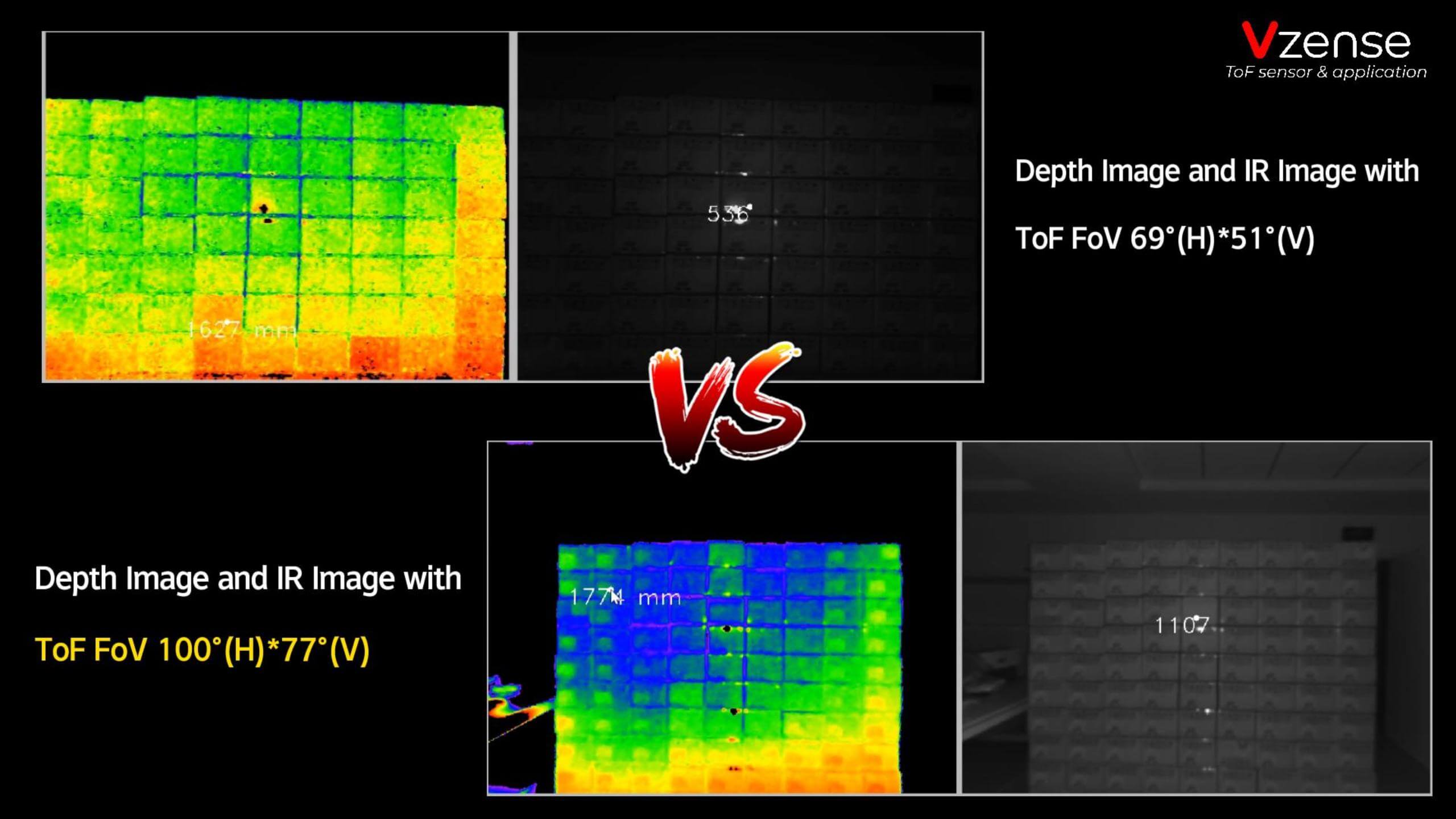
2022-12-23 Vzense ToF 相机大视场角展示
2023-01-31 Vzense DS77C ToF相机黑色托盘测试